
1.イノベーション戦略策定事業の対象テーマ名(実施年度)
光集積回路型LiDARのドローン・ロボット向け市場開拓に関する戦略策定(令和2-3年度)
委託先:(一財)光産業技術振興協会
2.事業実施後の成果普及
光産業技術振興協会は、本事業の成果に基づきNEDOに提案を行い、令和4年度NEDOの先導研究に採択され、「エネルギー・環境新技術先導研究プログラム / 空のモビリティ用光集積型LiDARセンサ(令和4年度~令和5年度、受託金額は約200百万円)」を実施しています。
また、プロジェクト参加者による国際学会誌への論文発表(令和3年9月掲載)も行われました。
3.イノベーション戦略策定事業の実施概要
目的
光レーダーであるLiDAR(Light Detection and Ranging)技術は、距離測定のみならず3次元イメージセンサーとしても有望で、これまで自動走行車用に研究開発されてきました。しかし、自動車用は安全性などの要求が厳しく、事前に、ドローン、ロボットなど他の市場を開拓し、使用実績を積むことが重要になっています。
そのため、ドローン、ロボット向けのユースケースと要求仕様を調査・分析するとともに、横浜国立大学で研究開発されてきた光集積回路型LiDARの特性評価実験を行って、産業用途向けに今後必要となる研究開発課題を明確にし、その社会導入に向けての戦略を策定しました。
事業概要
(一財)光産業技術振興協会に戦略策定委員会を設置し、学識経験者、産業界などが参加して、ドローン・ロボット向けのユースケース、光集積回路型LiDARの特性評価などを検討し、LiDARの社会導入のための戦略を策定しました。その主要な成果は次の通りです。
①ドローン・ロボットの有望なユースケースとその要求仕様の明確化
既存文献などからドローン・ロボットの市場を調査し、LiDARのユースケース候補(ドローン3件、FAロボット3件、搬送ロボット3件)を抽出し、ベンダー・ユーザ企業へのヒアリングを行いました。これにより、ドローンによるインフラ点検と障害物検知は、光集積回路型LiDARの小型・低価格などのメリットを活かせ、特にトンネルなどを飛行するドローンの速度計測がLiDARで可能になれば大きなインパクトがあることが明らかになりました。また、ロボットの高精度・中精度ピッキングにおけるLiDARによる距離測定も有望であることも明らかになりました。さらに、これらのユースケースの要求仕様も明らかにしました。
②光集積回路型LiDARの特性評価
横浜国立大学と東京工業大学に再委託して、FMCW方式の光集積回路型LiDARの特性評価実験を行いました。
これにより、LiDARを用いて速度や振動の計測が可能なことを原理実験で明確に示すとともに、FMCW方式により1mm以下の距離分解能の測定が可能であることを示し、ロボットのピッキングに利用できることなどが明らかになりました。
③今後の研究開発課題と社会導入の戦略策定
ヒアリングで明らかにした2つのユースケースの要求仕様と光集積回路型LiDARの特性を対比して研究開発課題を整理し、今後、研究開発プロジェクトを行って社会導入するための戦略を策定しました。
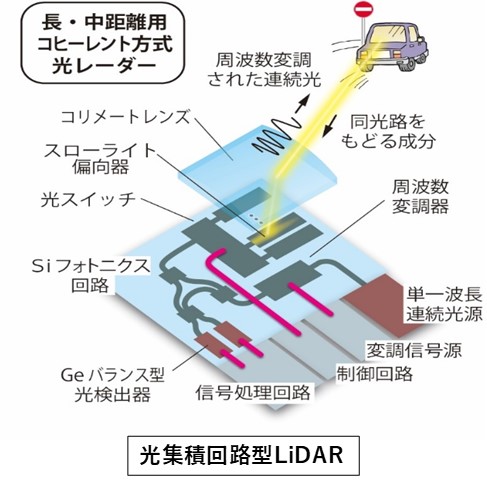
図 光集積回路型LiDARによる速度計測の原理実験
(a) 実験の概念図と写真
(b) 距離と速度の同時計測結果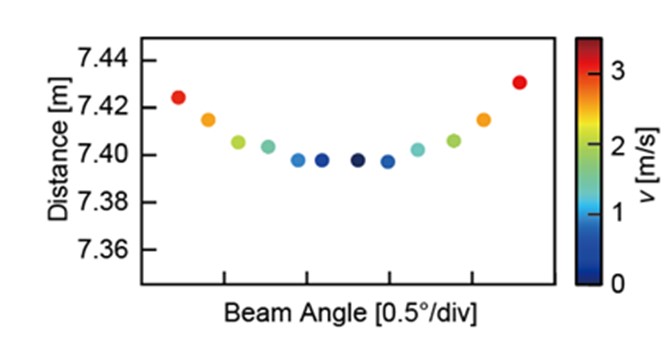
4.お問い合わせ先
[1] 本事業の報告書の提供をご希望の方は、以下の資料送付申し込みページからお申し込みください。
https://www.mssf.or.jp/contact/#request
[2] 本件に関するお問い合わせは、以下のお問い合わせフォームからお願い申し上げます。
https://www.mssf.or.jp/contact/#inquiry